Abaqus和Dymola的联合仿真方法实现ABS的现实系统级仿真
|
近日,网上流传的一段视频引发网友热议,一辆地方女驾驶员驾驶的北京牌照橘黄色“JEEP指南者”与解放军某部轮式步战车发生碰撞。后据媒体调查报道,事故原因是当天解放军某部装甲车队奉命参加上级组织的应急机动演练,行军自东向西通过某市南二环时,在车队正常行进过程中,行至某小区前,一辆驾驶JEEP车的女司机不愿停车避让,而是加速想从军车车队中穿行而过。看到突然间横着冲到眼前的轿车,步战车驾驶员立即采取制动措施,但是还是没能完全避让开,步战车前侧与JEEP车左侧发生剐蹭。  不过抛开事件本身,行车安全问题对我们每个人来说都是至关重要的。一般汽车在紧急制动时,如果四个车轮被完全锁死,这时汽车只要在轻微侧向力作用下,就会发生侧滑,甚至调头甩尾;当汽车行驶在弯道上时,由于前轮抱死,汽车将丧失转向能力,车辆将沿惯性方向前进直至停止,此时车辆如同一块冰在平面上滑动,其轨迹无法控制。而防锁死制动系统其功能就是避免刹车锁死,并使车辆在刹车时仍能有控制方向的能力。轮胎测速器大约在车轮每转一周内发出90-100个脉冲以量得轮胎旋转的角速度和角加速度,由刹车压力调解器决定是否释放压力,从而达到在车轮滚动中最佳制动的目的。 仿真技术是开发汽车安全系统的关键组成部分之一,在开发流程早期进行虚拟仿真能节约后期物理测试昂贵的成本、时间和资源。要准确仿真防锁死制动系统 (ABS) ,需要在不同物理域中准备各个子系统详细模型。使用统一分析工具为制动、车轮和控制组件创建精细模型难度非常大,甚至可以说是不可能。但可以采用联合仿真的策略来解决这一难题。同时使用不同的仿真工具能够实现创建跨专业、跨领域的耦合模型。  Abaqus具备强大的非线性连续能力和多样化的建模功能,已被证明是轮胎仿真的理想工具。Dymola则有能力高效率抽象逻辑建模,是液压系统和控制系统仿真的理想之选。 对整个ABS的系统级仿真来说,单独使用其中之一都无法取得理想的效果。为此目的展示了一种联合仿真方法,在运行中将Abaqus和Dymola耦合起来仿真系统的动态情况,这是任意一种单一软件无法做到的。车轮系统的结构响应和控制系统的逻辑响应在Abaqus和Dymola之间同步交换。由此施加在车轮上的制动负荷由ABS电子逻辑根据来自机械系统的输入加以控制。 为实现联合仿真,Abaqus和Dymola模型必须有对应的通信接口。这可以通过在Abaqus模型中定义传感器和执行器,向Dymola逻辑模型收发信号来实现。制动分析的对象是使用逐渐增大的制动踏板力量让车轮总成从初始速度10m/s降速下来。制动系统的机械状态用作控制信号。Dymola使用它激励Abaqus模型中的卡钳,这样就能够施加和调制制动力,避免车轮锁死或在路面上彻底打滑。 Dymola逻辑模型的原理方框图见下图。该制动系统由通过三端口阀门连接到主制动缸的单制动卡钳气缸组成。三通阀门有三种工作模式:主制动缸与从制动缸相连的增压模式;所有端口断开的保持模式;从制动缸与油槽相连的减压模式。该系统代表ABS实现的简单形式,即制动液在制动事件发生之后才返回主制动缸。 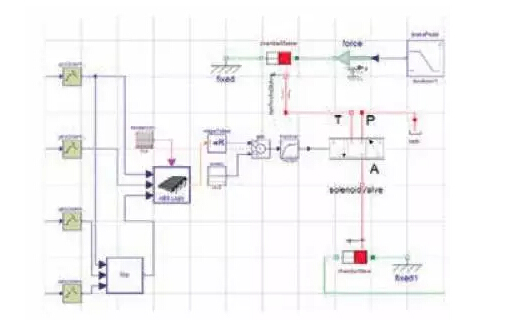 在车轮减速下降到低于当前规定的阈值-a时就会触发ABS。此时压力会保持恒定,直至滑动超过阈值λT,此时压力下降到一定的值。 当纵向速度小于特定水平时也会解除该控制器。此外,如果ABS控制算法处于某种状态过长时间,也会使用超时参数重置ABS控制算法。这样可以在不需要制动行为时避免控制器被锁死。  随后将自由滚动状态的轮胎导入Abaqus/Explicit,用于与Dymola的制动联合仿真。在Abaqus/Explicit计算滚动轮胎中的应力状态和形变时,车轮的角速度和角加速度会通过Abaqus的传感器定期提供给Dymola。所需的制动压力先由Dymola计算,然后返回Abaqus/Explicit,以施加在制动卡钳缸上。随后制动盘压紧制动盘,产生制动力矩,为车轮总成减速。 每次Abaqus仿真的增量——传感器信息经计算后通过基于套接的接口传递给Dymola。Dymola读取用作控制逻辑输入的Abaqus传感器信息,并按Abaqus/Explicit使用的增量大小及时完成传递。Dymola中计算的激励信号传递回Abaqus,由Abaqus将该新计算的负荷施加于下一增量上。这一过程反复进行,直至仿真时间用尽。 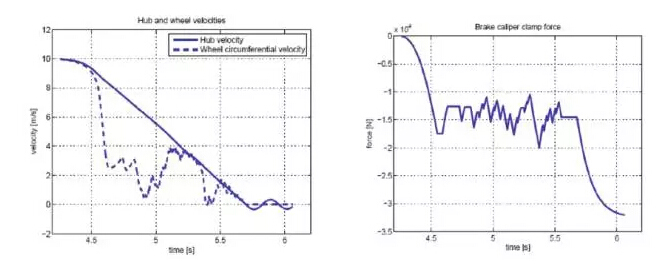 从上面的介绍可以看出仿真技术可以进一步加强防锁死刹车系统的安全性和可靠性,从而大大提高我们的行车安全。但是还是要郑重提醒各位安全驾驶,再先进的ABS也不是什么救命法宝,小心开车,不超速,不玩危险动作,才是安全行驶的最佳保障。 工厂360 —— 专注工厂全生命周期精益运维和数字化智能化 
|




